
Τόπος καταγωγής:
Κίνα
Μάρκα:
Hwashi
Πιστοποίηση:
CE
Μας ελάτε σε επαφή με
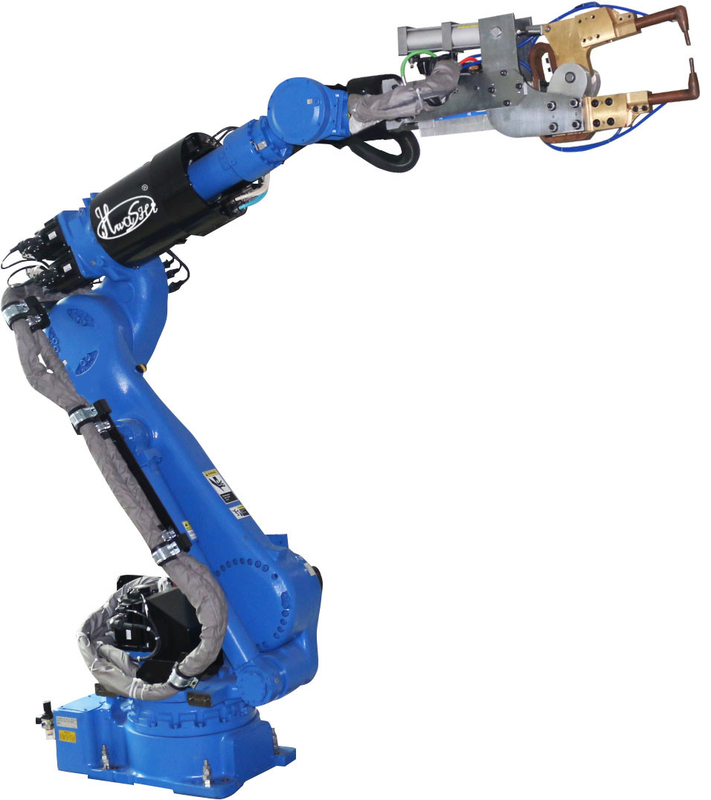

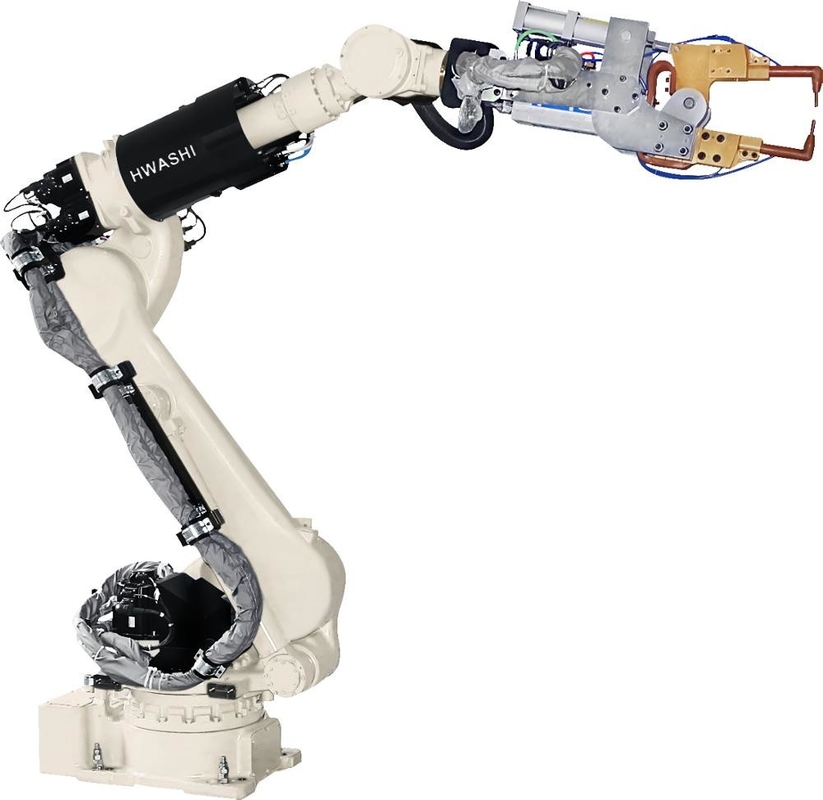
Το ρομπότ συγκόλλησης σημείων αποτελείται από το σώμα ρομπότ έξι-άξονα 165KG, σύστημα ελέγχου υπολογιστών, που διδάσκει το κιβώτιο και το σύστημα συγκόλλησης σημείων. Το ρομπότ συγκόλλησης σημείων μπορεί να αντικαταστήσει ανθρώπινο χειρωνακτικό welding.reducing η ένταση εργασίας του οξυγονοκολλητή, αλλά και μπορεί να εξασφαλίσει την ποιότητα της συγκόλλησης και να βελτιώσει την αποδοτικότητα συγκόλλησης. Ευρέως χρησιμοποιημένος
στη αυτοκινητοβιομηχανία, τα μηχανήματα κατασκευής, τη δύναμη διέλευσης ραγών, βιομηχανίες εξοπλισμού ολοκληρωμένου κυκλώματος τις στρατιωτικές και άλλες,


Οι προδιαγραφές για το ρομπότ 5 οπλίζουν τα πρότυπα:
| Πρότυπο | HS-r6-08 | HS-r6-10 | HS-r6-20 | HS-r6-50 | HS-r6-165 | |
| DOF | 6 | |||||
| Οδηγώντας τρόπος | Σερβο Drive εναλλασσόμενου ρεύματος | |||||
| Αποτελεσματικό φορτίο | 8KG | 10KG | 20KG | 50KG | 165KG | |
| Επαναλάβετε την ακρίβεια | ±0.05mm | |||||
| Ακτίνα εργασίας | 1400mm | 1589mm | 1595mm | 1950mm | 2483mm | |
| Βάρος | 180KG | 180KG | 290KG | 600KG | 1300KG | |
| Σειρά κινήσεων (°) | J1 | ±170 | ±170 | ±170 | ±180 | ±180 |
| J2 | ±120~-85 | ±120~-80 | ±132~-95 | ±130~-90 | ±80~-60 | |
| J3 | ±85~-165 | ±85~-165 | ±73~-163 | ±75~-210 | ±80~-190 | |
| J4 | ±180 | ±180 | ±180 | ±360 | ±360 | |
| J5 | ±135 | ±135 | ±133 | ±115 | ±115 | |
| J6 | ±360 | ±360 | ±360 | ±360 | ±360 | |
| Ανώτατη ταχύτητα (°/s) | J1 | 130 | 130 | 147 | 158 | 100 |
| J2 | 130 | 130 | 100 | 149 | 90 | |
| J3 | 130 | 130 | 135 | 130 | 104 | |
| J4 | 270 | 270 | 300 | 215 | 144 | |
| J5 | 170 | 170 | 198 | 251 | 160 | |
| J6 | 455 | 455 | 194 | 365 | 215 | |
| Δύναμη | 4KVA | 4KVA | 6KVA | 14KVA | 31KVA | |
| Τάση | 380V ή 220V | |||||
| Συχνότητα | 50Hz ή 60Hz | |||||
Περιγραφές των ρομπότ συγκόλλησης.
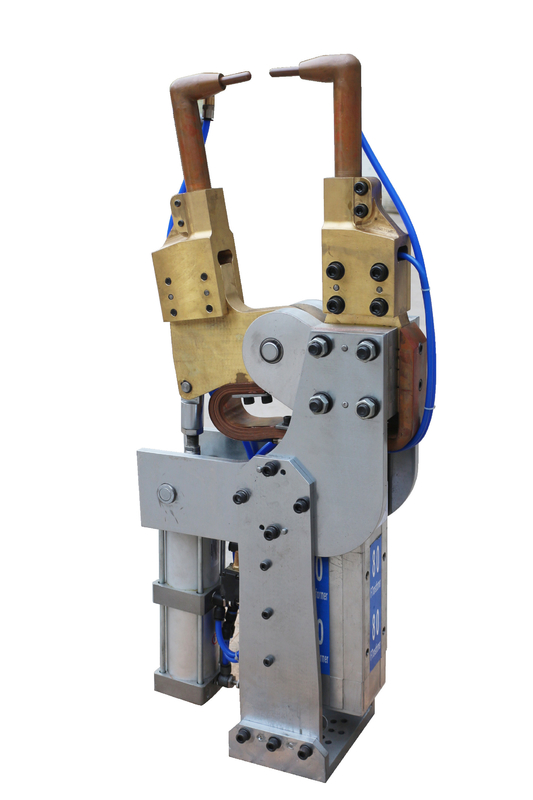
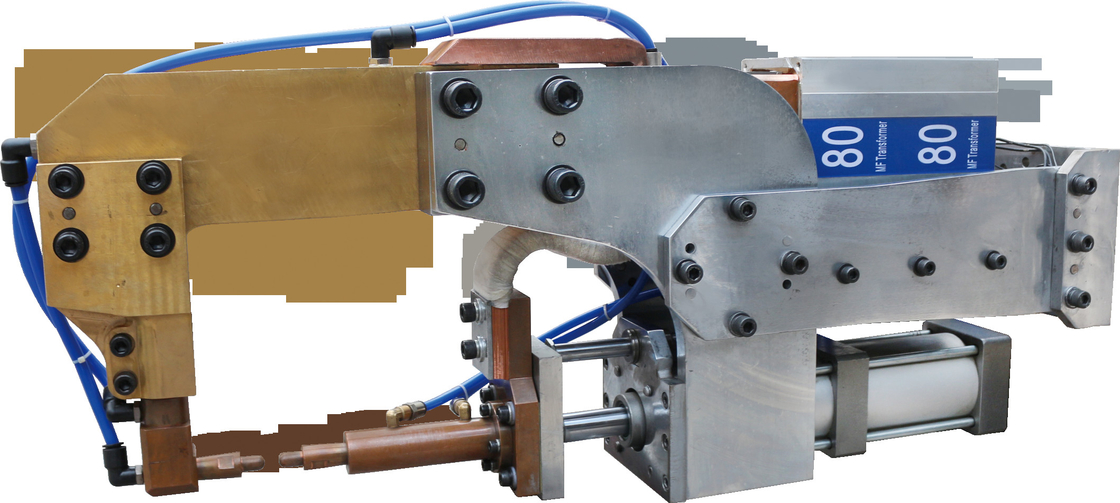
1. Σύμφωνα με το αίτημα των ενωμένων στενά προϊόντων, σχεδιάζουμε το ρομπότ χρησιμοποιώντας ένα πλαίσιο έξι-άξονα που εξοπλίζεται με tig/mig τους οξυγονοκολλητές για να ολοκληρώσει τη συγκόλληση αυτόματα.
2. Το ρομπότ συγκόλλησης χρησιμοποιεί τον κύλινδρο ή το σφιγκτήρα και χρησιμοποιεί την αρχή δύναμης για να καθορίσει το προϊόν. Κατά αυτόν τον τρόπο, μπορεί να καλύψει τις απαιτήσεις για την αυτόματη συγκόλληση και να σιγουρευτεί το ρομπότ μπορεί να ενώσει στενά κάθε μέρος του προϊόντος.
3. σύμφωνα με την απαίτηση αποδοτικότητας παραγωγής, σχεδιάζουμε δύο σύνολα κοu'φωμάτων. Κάποιος χρησιμοποιείται για τη φόρτωση των κομματιών εργασίας, άλλο χρησιμοποιείται για τη συγκόλληση. Βελτίωση της ποιότητας συγκόλλησης και της αποτελεσματικότητας συγκόλλησης.
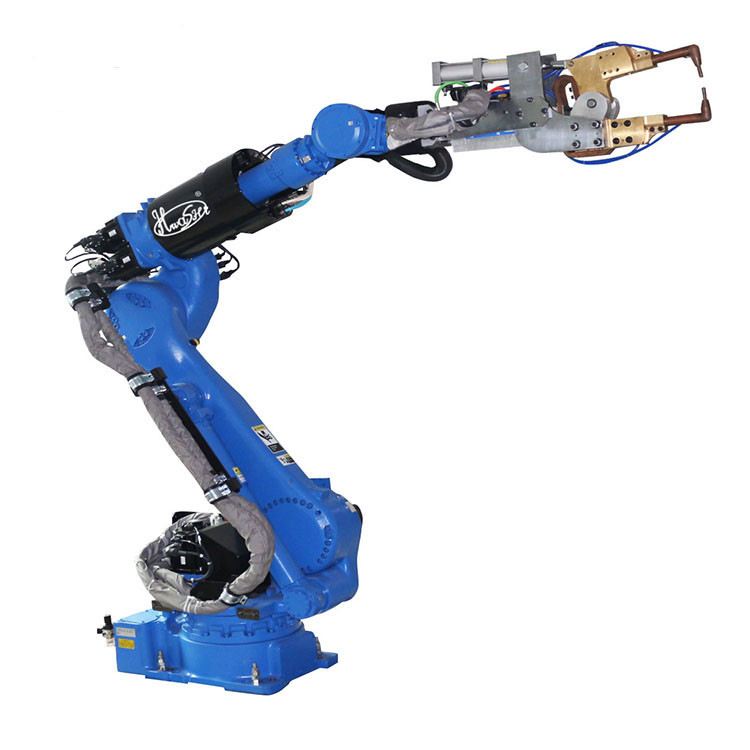
Ο τερματικός σταθμός & το προσάρτημα ρομπότ συγκόλλησης μπορούν να σχεδιαστούν σύμφωνα με τα προϊόντα σας,
Σαφής προγραμματισμός σκελών ρομπότ μακρινός.
Ένα πλήρες ρομπότ συγκόλλησης περιλαμβάνει το σκέλος ρομπότ, τη chaning συσκευή θέσης, το κιβώτιο ελεγκτών, προγραμματισμός μακρινός, καλώδια, κ.λπ.
Μας στείλετε την έρευνά σας άμεσα σε


