HWASHI εργοστάσιο άμεση πώληση CNC έπιπλα από ανοξείδωτο χάλυβα βιομηχανικό χειριστή συγκόλλησης
Το ρομπότ συγκόλλησης HWASHI είναι συμπαγές, με μικρό μέγεθος, το οποίο είναι ένα ειδικό ρομπότ συγκόλλησης τόξου.πρόσβαση σε μονοπάτι συγκόλλησης υψηλής ακρίβειας, συντομεύει τον κύκλο συγκόλλησης, με υψηλή ακρίβεια επαναλήψεως θέσης, γρήγορη λειτουργία, σταθερότητα της διαδικασίας συγκόλλησης, υψηλή συνέπεια της συγκόλλησης και μπορεί να συντομεύσει τον κύκλο αντικατάστασης του προϊόντος,Η αντίστοιχη επένδυση σε εξοπλισμόΧρησιμοποιείται ευρέως στην αυτοκινητοβιομηχανία και στα εξαρτήματα, τις μοτοσυκλέτες και τα εξαρτήματα, τα μηχανήματα μηχανικής και άλλους τομείς συγκόλλησης μετάλλων.
Προηγούμενο έργο
Μονάδα ρομπότ συγκόλλησης καπάκις πηγάδι από ανοξείδωτο χάλυβα
(Εφαρμόζεται σε έναν από τους διάσημους κατασκευαστές πηγάδι στην Ινδία)
Απαιτήσεις του πελάτη
1. Χρησιμοποιήστε ρομπότ για την αντικατάσταση εργατικού δυναμικού για την συγκόλληση. Εγχειρησιακή φόρτωση και εκφόρτωση του προϊόντος. Μια φορά στερεοποίηση του προϊόντος στο κορμί. 2. Υλικό του εργαστηρίου: σιδηρούχιο χάλυβα, πάχος τοίχου: 0.8-1.2mm;ΜέγεθοςΤο εργασιακό κομμάτι πρέπει να συγκολλείται εναλλακτικά στην μπροστινή και την πίσω πλευρά και να ζητείται να μειωθεί η παραμόρφωση. 4.Το μπροστινό καπάκι και πίσω καπάκι θα συγκολληθεί σε ξεχωριστό ρομπότ- Δέχεται να συγκολλήσει το καπάκι του πηγάδι σε διάφορα βήματα.
Περιγραφή του προϊόντος
01Η περαιτέρω ανάπτυξη της αυτοματοποίησης της προγραμματιζόμενης παραγωγής είναι ευέλικτη εκκίνηση.μπορεί να διαδραματίσει καλό ρόλο στην ευέλικτη διαδικασία παραγωγής μικρών παρτίδων και πολλαπλών ποικιλιών, και αποτελεί σημαντικό μέρος του ευέλικτου συστήματος παραγωγής·
02Τα ανθρωπομορφικά βιομηχανικά ρομπότ έχουν ανθρώπινο περπάτημα, περιστροφή της μέσης, μεγάλα χέρια, μικρά χέρια, καρπούς και νύχια σε μηχανική δομή, και υπολογιστές στον έλεγχο.Τα έξυπνα βιομηχανικά ρομπότ έχουν επίσης πολλούς "βιοαισθητήρες" παρόμοιους με τους ανθρώπους, όπως αισθητήρες επαφής τύπου δέρματος, αισθητήρες δύναμης, αισθητήρες φορτίου, οπτικοί αισθητήρες, ακουστικοί αισθητήρες, λειτουργίες γλώσσας κλπ.Ο αισθητήρας βελτιώνει την ικανότητα προσαρμογής του βιομηχανικού ρομπότ στο περιβάλλον03. Γενικότητα Εκτός από ειδικά σχεδιασμένα βιομηχανικά ρομπότ, τα γενικά βιομηχανικά ρομπότ έχουν καλή ευελιξία στην εκτέλεση διαφορετικών καθηκόντων.εργαλεία, κλπ.) των βιομηχανικών ρομπότ μπορούν να εκτελέσουν διαφορετικά καθήκοντα.
Η ροή εργασίας
1) Η χειροκίνητη φόρτωση του εργασιακού μεριδίου στο σύστημα στοποθέτησης στο σταθμό 1·
2) Ξεκινήστε την συγκόλληση.
3) Τα ρομπότ και οι μηχανές συγκόλλησης θα συγκολλήσουν το εργασιακό κομμάτι σύμφωνα με το προεπιλεγμένο πρόγραμμα.
4) Η συγκόλληση ολοκληρώθηκε.
5) Ενώ το σταθμό 1 συγκολλείται, το σταθμό 2 φορτώνει και εκφορτώνει το εργασιακό κομμάτι συγχρονικά
Προδιαγραφές για 5 μοντέλα ρομποτικών βραχίων
|
Σχήμα
|
Ειδικότερα: |
Επικαιροποιημένο |
Επικαιροποιημένο |
Υγρότητα: |
Υγεία και υγεία |
|
DOF
|
6
|
|
Τρόπος οδήγησης
|
Ενεργειακή κίνηση
|
|
Αποτελεσματική επιβάρυνση
|
8 κιλά
|
10 κιλά
|
20 κιλά
|
50 κιλά
|
165 κιλά
|
|
Επαναλαμβανόμενη ακρίβεια
|
±0,05 mm
|
|
Δραστηριακή ακτίνα
|
1400 χιλιοστά
|
1589 χιλιοστά
|
1595 χιλιοστά
|
1950 χιλιοστά
|
2483 χιλιοστά
|
|
Βάρος
|
180 κιλά
|
180 κιλά
|
290 κιλά
|
600 κιλά
|
1300 κιλά
|
|
Πεδίο κίνησης ((°)
|
J1
|
±170
|
±170
|
±170
|
± 180
|
± 180
|
|
J2
|
± 120~-85
|
± 120~-80
|
±132~-95
|
±130~-90
|
±80~-60
|
|
Ε3
|
±85~-165
|
±85~-165
|
±73~-163
|
±75~-210
|
±80~-190
|
|
J4
|
± 180
|
± 180
|
± 180
|
± 360
|
± 360
|
|
J5
|
±135
|
±135
|
±133
|
±115
|
±115
|
|
J6
|
± 360
|
± 360
|
± 360
|
± 360
|
± 360
|
|
Μέγιστη ταχύτητα ((°/s)
|
J1
|
130
|
130
|
147
|
158
|
100
|
|
J2
|
130
|
130
|
100
|
149
|
90
|
|
Ε3
|
130
|
130
|
135
|
130
|
104
|
|
J4
|
270
|
270
|
300
|
215
|
144
|
|
J5
|
170
|
170
|
198
|
251
|
160
|
|
J6
|
455
|
455
|
194
|
365
|
215
|
|
Δύναμη
|
4KVA
|
4KVA
|
6KVA
|
14KVA
|
31KVA
|
|
Τετάρτη
|
380V ή 220V
|
|
Συχνότητα
|
50Hz ή 60Hz
|
Προηγούμενο έργο: Μονάδα ρομπότ συγκόλλησης ράβδων αποθήκευσης (εφαρμόζεται σε έναν από τους κατασκευαστές ράβδων αποθήκευσης στη Νότια Κορέα)

Απαιτήσεις του πελάτη
1Χρησιμοποιήστε ρομπότ για την αντικατάσταση εργατικού δυναμικού για συγκόλληση.
2Υλικό του εργαστηρίου: σίδηρο, χάλυβα, πάχος τοιχώματος: 2-5mm, μέγεθος: μήκος: 1300-2700mm πλάτος: 200mm
3Το εργασιακό κομμάτι πρέπει να συγκολλείται εναλλακτικά σε δύο άκρες των αρθρώσεων και να ζητείται να μειωθεί η παραμόρφωση.
Σενάρια εφαρμογής και δείγμα συγκόλλησης
Λύσεις
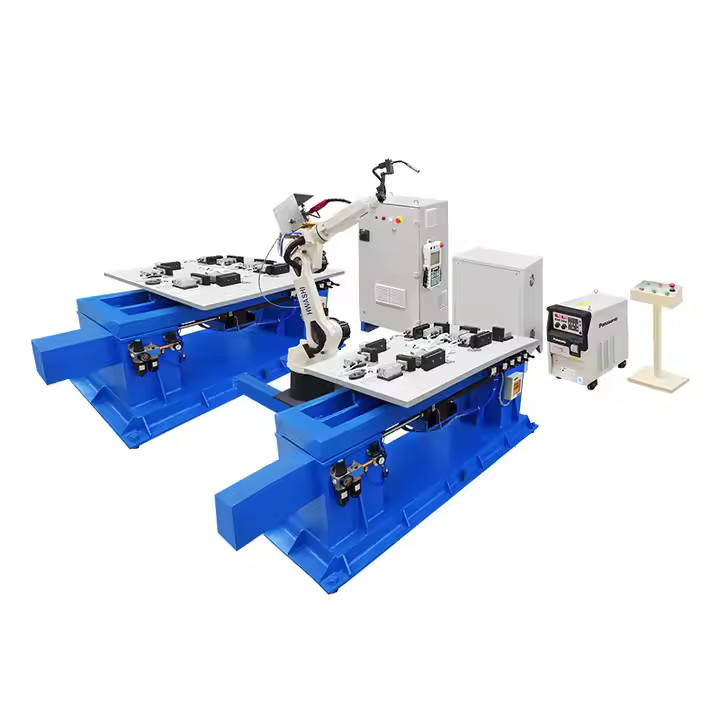
1Το ολοκληρωμένο σύστημα ρομπότ συγκόλλησης περιλαμβάνει 2 σύνολα ρομπότ μήκους 1.4m HS-R6-08, 2 σύνολα μηχανής συγκόλλησης 350A MIG, 2 σύνολα αυτοματοποιημένου πυροβόλου συγκόλλησης κατά της σύγκρουσης,Δύο σύνολα ενός άξονα κατακόρυφου τοποθετητή περιστροφής, 1 σύνολο καθαριστικού καπνού συγκόλλησης και 2 σύνολα ελαστικών συγκόλλησης (κάθε ελαστικό μπορεί να φορτωθεί με δύο κομμάτια δέσμης ράφους στροζ), κλπ.
2Για να διασφαλιστεί η σταθερότητα και η σταθερότητα της ποιότητας συγκόλλησης, προτείνουμε να εξοπλιστούν με συσκευή καθαρισμού συγκόλλησης.
3Η αυτόματη συγκόλληση πραγματοποιείται από το ρομπότ MIG έξι αξόνων.Οι κύλινδροι ή οι γρήγοροι σφραγίστες χρησιμοποιούνται για τη σταθεροποίηση της θέσης του προϊόντος με την αρχή του μοχλού για να εξασφαλιστεί η θέση των απαιτήσεων της αυτόματης συγκόλλησης του ρομπότΣύμφωνα με τις απαιτήσεις της αποδοτικότητας της παραγωγής, σχεδιάζονται δύο σετ ενός εστιαστήρα θέσης ενός άξονα,για την κατασκευή ή την κατασκευή οχημάτων με κινητήρα,Ένα για συγκόλληση.
Επιπτώσεις της εφαρμογής
1. Διπλή-σταθμός σταθερή διάταξη τραπέζι μπορεί να συνειδητοποιήσει μακροχρόνια συνεχής συγκόλληση, η αποτελεσματικότητα συγκόλλησης και ποιότητα συγκόλλησης έχει βελτιωθεί σημαντικά.
2Το σταθερό τραπέζι πραγματοποιεί τη συμπίεση του εργασιακού μερίδιου κάθε φορά και πραγματοποιεί αυτόματα την εναλλακτική συγκόλληση του προϊόντος, έτσι ώστε η παραμόρφωση να ελέγχεται αποτελεσματικά.
3Η μηχανή αυτή μπορεί να επιτύχει αυτόματη συγκόλληση με χειροκίνητο φορτίο υλικού. Μπορεί επίσης να βελτιώσει την ποιότητα συγκόλλησης και την απόδοση συγκόλλησης. Επιπλέον, μπορεί να μειώσει το κόστος παραγωγής.Το πρόβλημα της αστάθειας της ποιότητας και της χαμηλής αποδοτικότητας της παραγωγής που προκαλείται από καθαρά χειροκίνητη λειτουργία έχει επιλυθεί.
4Η βιομηχανία συγκόλλησης είναι μια βιομηχανία υψηλού κινδύνου, η υψηλή θερμοκρασία, το φως τόξου και ο καπνός συγκόλλησης έχουν μια ορισμένη επίδραση στη σωματική και ψυχική υγεία των εργαζομένων.
5Είναι αναπόφευκτη τάση η χρήση ρομπότ για την αντικατάσταση ρομπότ συγκόλλησης στη συγκόλληση, η οποία δεν είναι μόνο η προώθηση της αγοράς, αλλά και η απαίτηση της τεχνολογικής αναβάθμισης.
Η ροή εργασίας
1) Η χειροκίνητη φόρτωση του εργασιακού μεγέθους στο σταθερό τραπέζι στο σταθμό 1.
2) Ξεκινήστε την συγκόλληση.
3) Το ρομπότ και η μηχανή συγκόλλησης θα κάνουν συγκόλληση στο εργασιακό κομμάτι σύμφωνα με το προεπιλεγμένο πρόγραμμα.
4) Η συγκόλληση ολοκληρώθηκε.
5) Κατά τη διάρκεια της συγκόλλησης του σταθμού 1, ο σταθμός 2 φορτώνεται και στερεώνει το εργασιακό κομμάτι συγχρονικά.
6) Εργασία κύκλου
Διαδικασίες συγκόλλησης με ρομπότ
Τα ρομπότ HWASHI παρέχουν μέγιστη εμβέλεια εργασίας και μπορούν να εγκατασταθούν από πολλαπλές πλευρές για να βελτιωθεί η ευελιξία του συστήματος.Οι πηγές ενέργειας συγκόλλησης μπορούν να ταιριάζουν για να ανταποκρίνονται σε διαφορετικές απαιτήσεις συγκόλλησης και να πραγματοποιούν διάφορες διαδικασίες συγκόλλησης..
Παροχή διαφορετικών τύπων positioner συγκόλλησης
1. μπορεί να εργάζεται σε συντονισμό με το ρομπότ για να εξασφαλίζει σταθερή ταχύτητα συγκόλλησης και στάση και να παρέχει υψηλότερη ποιότητα συγκόλλησης.
2Χρησιμοποιήστε εισαγόμενους κινητήρες με υψηλή ακρίβεια, υψηλή ακρίβεια περιστροφής, ακριβή τοποθέτηση και ισχυρή αντοχή.
3Με τη στροφή του εργασιακού τμήματος που είναι στερεωμένο στο τραπέζι εργασίας προς την απαιτούμενη γωνία συγκόλλησης.
Παρέχει τον 7ο άξονα της εξατομικευμένης μηχανής
1- αύξηση της εμβέλειας του ρομπότ για την επίλυση των μειονεκτημάτων της περιορισμένης εμβέλειας που προκαλείται από την περιορισμένη εμβέλεια της κίνησης του ρομπότ.
2Η εγκατάσταση του ρομπότ στη σιδηροδρομική γραμμή: το ρομπότ μπορεί να περπατήσει μόνο του ή να περπατήσει με τη συμβατή παροχή ενέργειας συγκόλλησης και το ντουλάπι ελέγχου του ρομπότ στο σύνολό του σύμφωνα με τις συνθήκες εργασίας των πελατών στο χώρο.
3Ειδικός μηχανισμός προστασίας για την πρόληψη των ψεκασμών συγκόλλησης ή της σκόνης στον αέρα που θα προκαλέσουν κακό αντίκτυπο των εξαρτημάτων ακριβείας.
4Για να προσαρμοστεί στις διαφορετικές συνθήκες των διαφορετικών πελατών, να είναι σε θέση να κάνει διαφορετική διαμόρφωση και εγκατάσταση για τον πελάτη.
Ενσωμάτωση ρομπότ
Εκτός από τα συστήματα ρομπότ HWASHI, μπορούμε επίσης να ενσωματωθούμε με διεθνείς μάρκες ρομπότ για να παρέχουμε πλήρεις λύσεις ρομπότ συγκόλλησης.
Χώρες ρομπότ και δείγμα συγκόλλησης
Εφαρμογές ρομπότ συγκόλλησης
Το ρομπότ συγκόλλησης μπορεί να συγκολλήσει σίδηρο, ανοξείδωτο χάλυβα, τσιμεντωμένους σωλήνες, πλάκες, σύρματα, σωλήνες και μικρά και μεγάλα εργασιακά κομμάτια μπορούν να συγκολληθούν ρομποτικά με καλό και όμορφο αποτέλεσμα συγκόλλησης

 Το μήνυμά σας πρέπει να αποτελείται από 20-3.000 χαρακτήρες!
Το μήνυμά σας πρέπει να αποτελείται από 20-3.000 χαρακτήρες!